Context
2nd year CS
Know about Binary Trees
DFS & BFS
Know about Graphs
Know of Greedy Algorithms
Know about Queues
Know about Priority Queues (high level)
Know about Heaps
Using Python
- Familiar with website delivery
More notes than slides
Discover ideas as opposed to throwing them at the students
Interpreter
Pencil & paper
Graphs¶
Graph:  .
.
Vertices:  .
.
- Edges:
 ,
, where

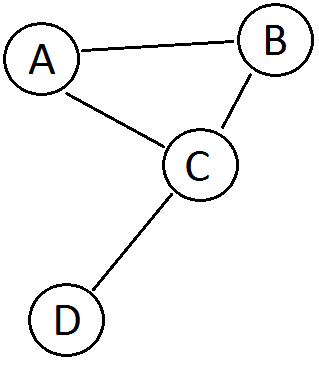
Example


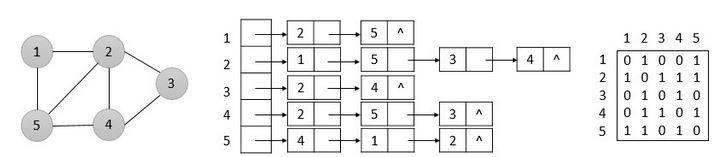
Implementation
Weighted Graphs
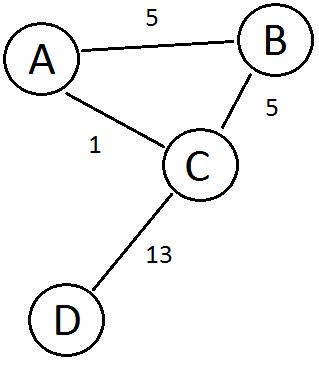
Each edge has a weight associated with it
More general
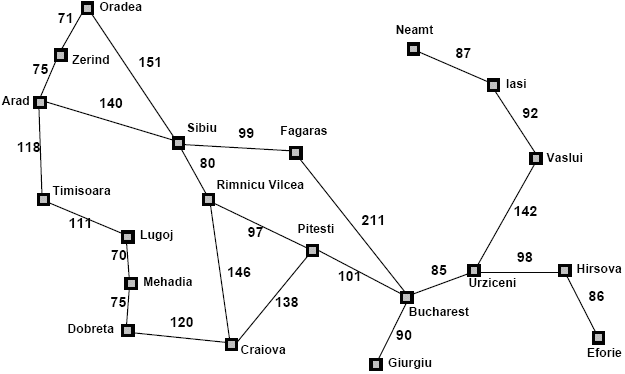
Airports
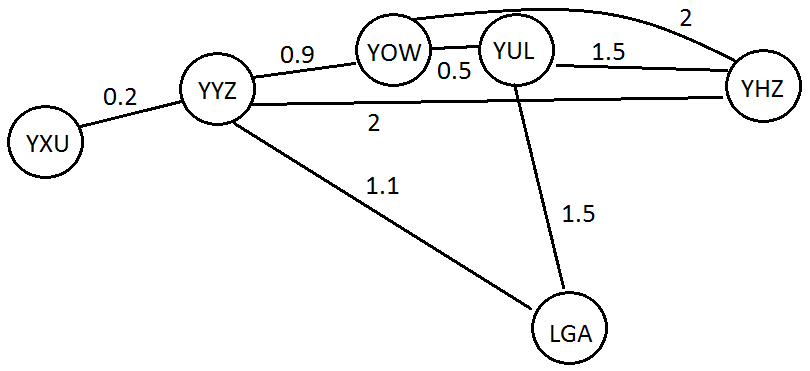
Road Networks (kinda’ to scale)
Problem: Route Planning¶
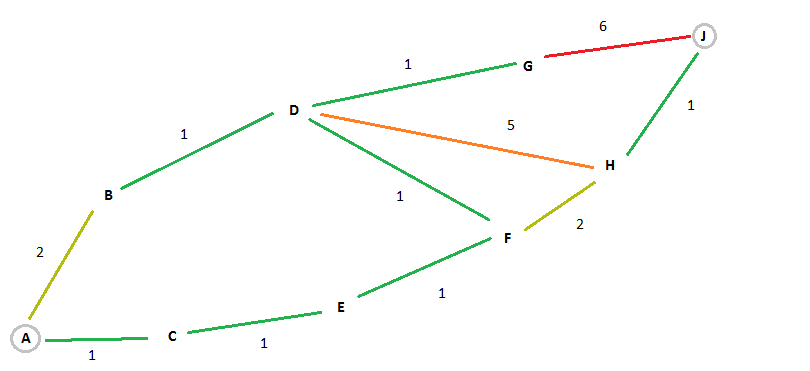
How do we get from point A to point J?
We want to minimize the sum of the edge weights on the path
Try every possible path? (Brute Force)
Activity
Find all paths from A to J.
A -> B -> D -> G -> J (length: 10)
A -> B -> D -> H -> J (length: 9)
A -> B -> D -> F -> H -> J (length: 7)
A -> C -> E -> F -> H -> J (length: 6)
A -> C -> E -> F -> H -> D -> G -> J (length: 17)
A -> C -> E -> F -> D -> G -> J (length: 11)
A -> C -> E -> F -> D -> H -> J (length: 10)
There are more, but these are the admissible ones
How would we implement this?
If we only needed 1 path, we could just do like a depth first search (DFS)
So let’s just keep doing a DFS until we exhaust all paths
Keep track of the paths, and in the end, pick the one with the smallest path

Simple, Lazy Greedy
OK, we know the above will work, but we end up having to do a lot of work…
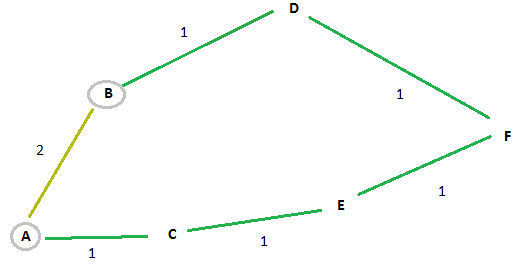
When given choices, always pick the smallest?
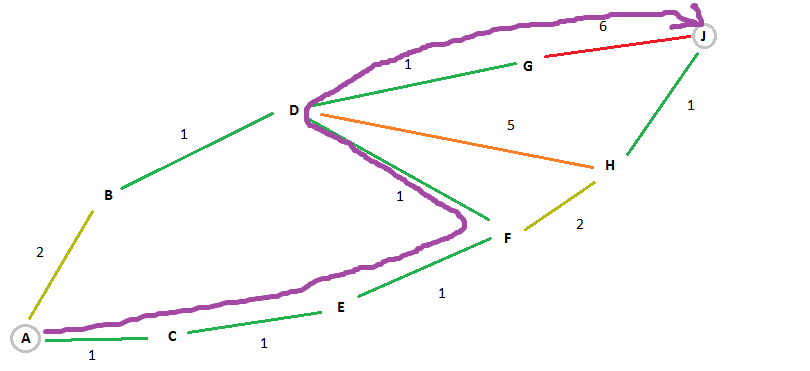
A -> C -> E -> F -> D -> G -> J (length: 11)
Not the best, but we only had to look at 1 path though!
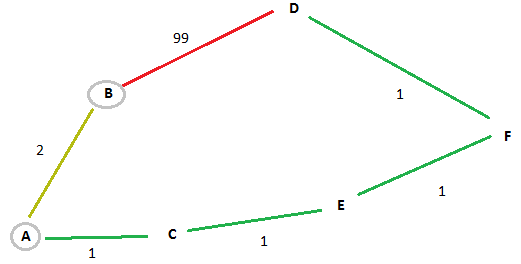
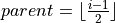
Let’s try on this example:
If we follow the same rule here, we actually end up with the worst path
Let’s try on this example:
Maybe we should not just consider the smallest option from a single node?
Maybe we should consider the paths from past nodes too?
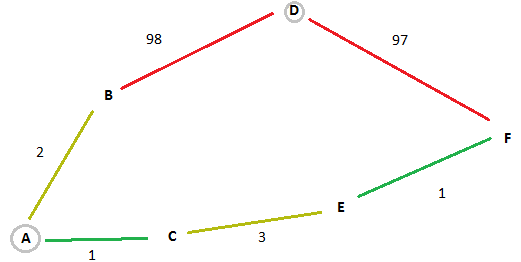
Unsurprisingly, it looks like it might be really important to know how far we’ve travelled so far
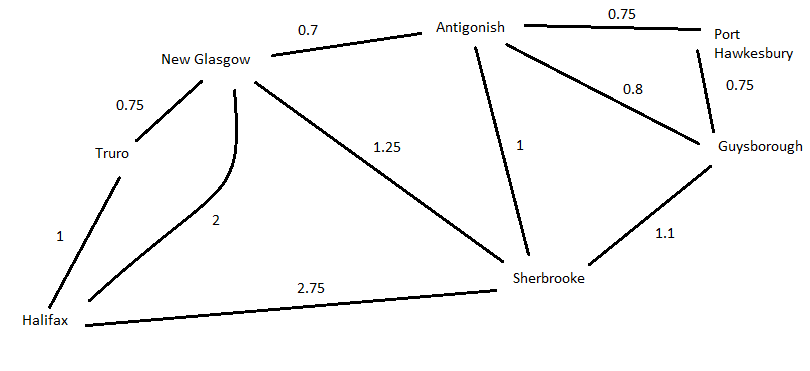
Principle of Optimality¶
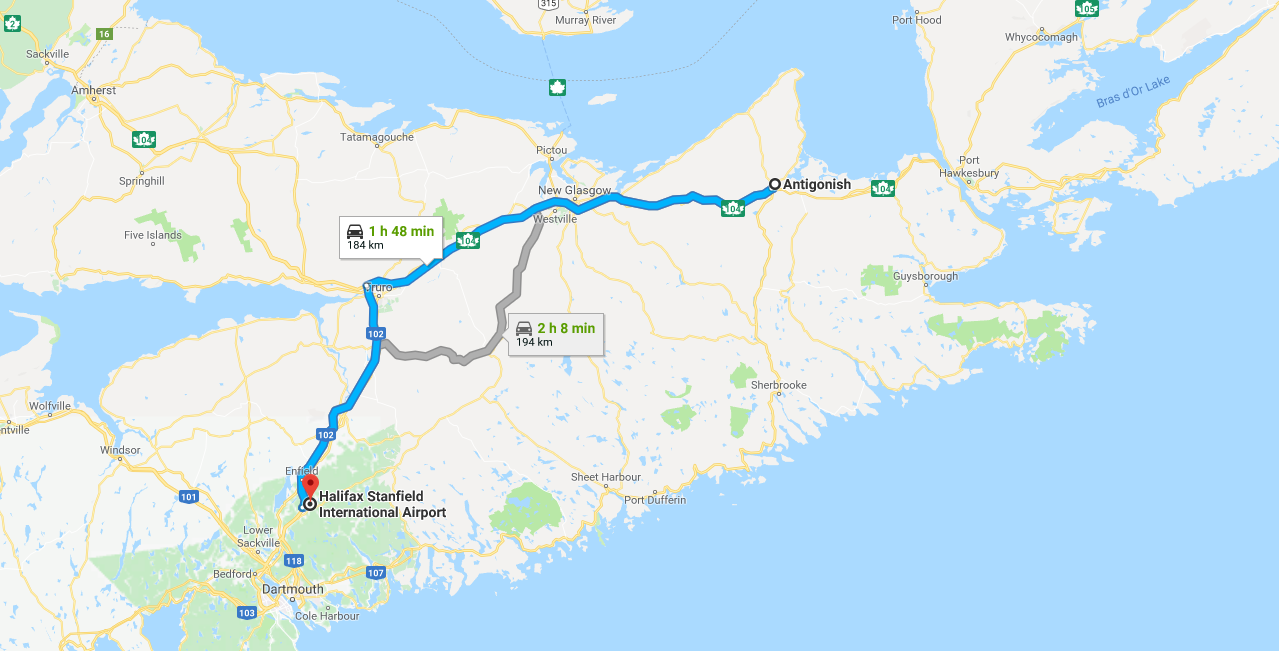
Fastest way to get to Halifax’s airport
Fastest way to Truro?
Fastest way to New Glasgow?
Given that we definitely have the shortest path to the airport:
- Is there not a shorter path to Truro from New Glasgow?
If there was one, it would have been apart of the shortest path to the airport
Our shortest path to the Halifax airport consists of:
The optimal path from Antigonish to New Glasgow
The optimal path from new Glasgow to Truro
The optimal path from Truro to the airport
This is called the Principle of Optimality!!
Dijkstra’s Algorithm¶
Shortest path algorithm
Intuition
- Do a breadth first search
Start spanning out
- We know that the optimal path will be a collection of optimal paths
Always remember the optimal path to nodes along the way
And remember the total distance so far
If we find a more optimal path to a vertex/node, we update it.
- We prioritize paths we know are shorter/faster
- Always look at what took the least amount of time to get to
What has the least weight from the start/source
Think of highways vs dirt mountain roads
Let’s take these ideas and see if we can work out the algorithm
Activity
Use the above ideas, and find the shortest path from A to J.
Algorithm:
Set all vertices/nodes as unvisited
Set all vertices/nodes’ distance from source to infinity
Set all vertices/nodes’ previous node to None/Null
Set start/source to current, and set it’s distance to 0
For the current node:
Note: whenever a node is the current, we know its distance from the start is optimal
- If current is the target
We’re done!
- For each unvisited neighbour:
Calculate the distance to the neighbour through current (current’s dist + edge dist)
- If this distance is less than the neighbour’s current distance from source:
Update it
Set previous node to current (remember where we came from)
Set current to visited
- Set unvisited node with smallest distance/weight to current
- If there are none left, or everything left has a dist of infinity
Then there must not be a solution
Priority Queue¶
We’re pulling things from the unvisited list in order of smallest distance so far
We can think of this distance as a priority
What is it?
Enqueue things into a priority queue with a priority
When we dequeue things, we get the thing with the lowest priority
Implementation
- Could use a list. Either:
- On insert, do a linear search and find where something goes.
 enqueue,
enqueue,  dequeue
dequeue
- OR, on remove, do a linear search for the smallest thing.
- enqueue, dequeue
Heaps¶
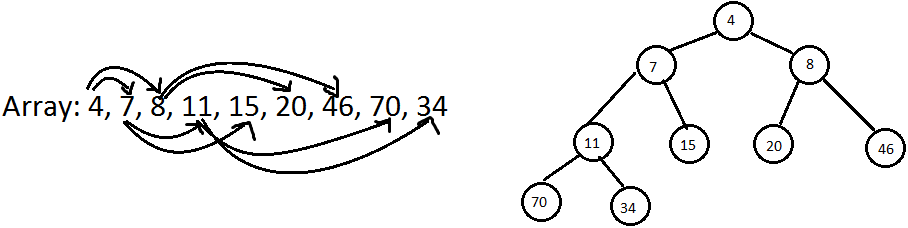
Assuming 0 based indexing of array/list:


Min Heap as Priority Queue
Insert/Enqueue

Max distance something could bubble?

Remove/Dequeue

Max distance something could bubble?
Update
- Assuming an adjacency list
Faster access to neighbours
- With an auxilliary data structure, we can easily access information in the heap
A dictionary keeping track of the indices of each vertex in the heap
- We can just remove the item, and re-enqueue it.
Complexity¶
Lazy

- Therefore:

Less Lazy
How many things could we possibly add to our heap?
All the vertices

How much work is it to add each thing to the heap?

(
with a linked list)
How many times might we need to update something in the heap
Each edge might cause an update

How much work is it to update something in the heap?
(
with a linked list)
- Therefore:

or

- Linked List

or
A* (A-Star)¶
Can be dumb though
Activity
How would Dijkstra’s algorithm traverse this graph?
When you want to get somewhere, what do you do to plan your route?