14. A-Star
We have seen how Dijkstra’s algorithm can help to find the shortest path in a graph.
However, it requires to visit every node which is time consuming.
We will now introduce a new concept heuristic search.
14.1. Heuristic search
Heuristic search is the name given to algorithms that are using a heuristic function to find the solution.
Definition
Heuristic function or heuristic is a function that provides an estimation of the unknown solution.
Using heuristic functions allow us to prune suboptimal solution, thus saving time.
14.2. A-Star
The \(A^*\) algorithm was created to solve path planning problem for robots in environments that could contain obstacles.
It was the first algorithm implementing tree pruning.
Instead of search in order of closeness from the source, it searches in order of closeness to the goal.
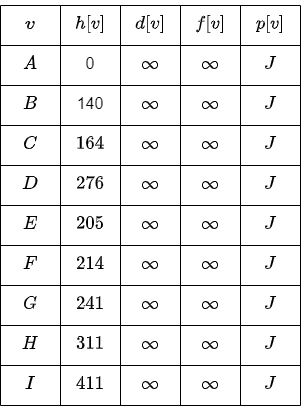
We had two arrays, \(h[v]\) and \(f[v]\):
\(h[v]\) will contain the distance to the node \(v\) calculated by the heuristic function.
\(f[v] = d[v]+h[v]\) is the estimated distance from \(s\) to \(v\).
It selects the node with the smallest \(f\).
14.2.1. How is it working?
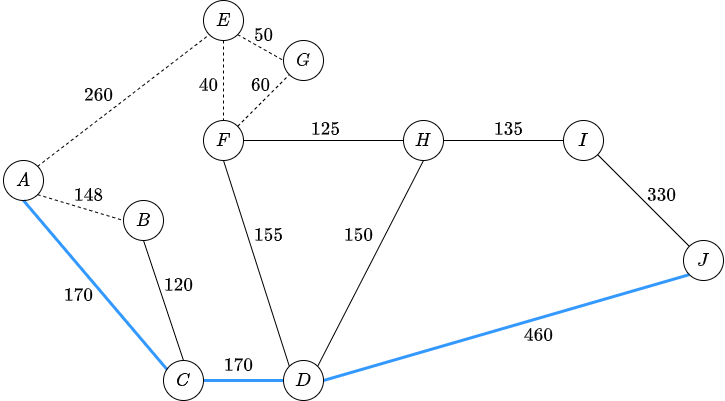
We will consider the following graph:
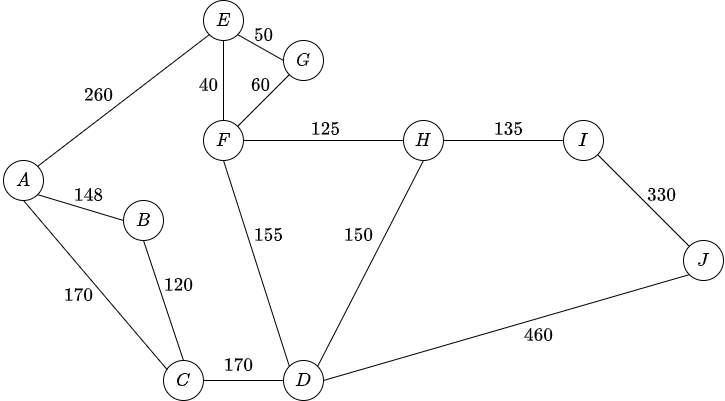
The source node is \(A\) and the goal is \(J\).
Using \(A^*\), we will start from \(J\).
We explores the adjacent edges.
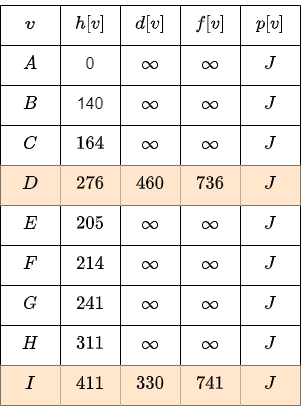
We visit the closest node \(D\) and explore the adjacent edges.
The smallest value \(f\) is for the node \(I\).
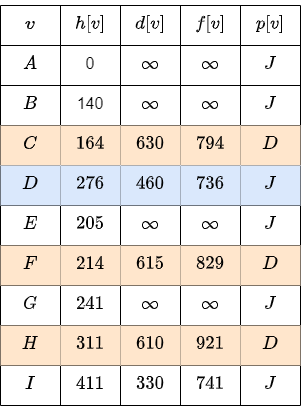
We visit \(I\) and check the edges.
We update \(H\), because it’s new value \(465\) is smaller than the previous \(610\).
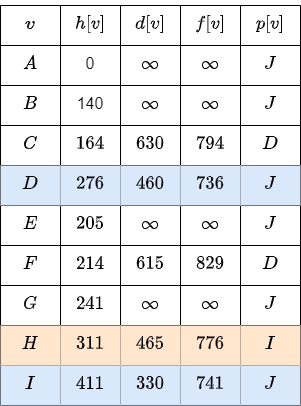
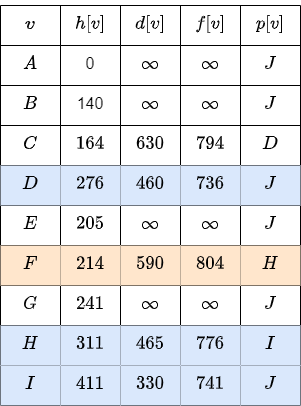
The smallest value is \(776\) for the node \(H\).
We visit this node and check the edge leading to \(F\).
The new value \(590\) is smaller than the previous value \(615\).
Now, the node with the smallest estimated distance is going through \(C\).
We are updated the adjacent nodes that are not visited yet, so \(A\) and \(B\).
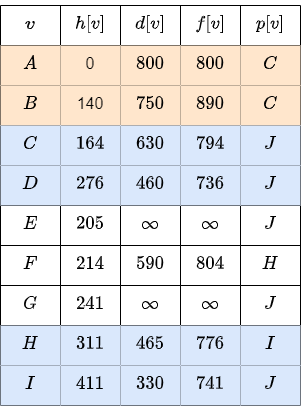
Since the distance to \(A\) is smallest that the other estimation, we stop.
14.2.2. Algorithm
Now, we can discuss the pseudocode:
Initialize V–S with all vertices except the starting vertex s.
for all v in V–S:
p[v] = s
if there is an edge (s, v):
d[v] = w(s, v)
f[v] = d[v] + h(v)
else:
d[v] = inf
f[v] = inf
while V–S is not empty:
u = find the smallest f[u]
if u == destination:
break
Remove u from V–S
Add u to S
for all v adjacent to u in V–S:
if d[u] + w(u, v) < d[v]:
d[v] = d[u] + w(u, v)
f[v] = d[v] + h(v)
p[v] = u