Topic 13 - Graph Algorithms
Now we have the tools to see some graph algorithms.
Topological Sort
A topological sort is an ordering of nodes in a directed acyclic graph.
If there is a path from \(v_i\) to \(v_j\).
Then \(v_j\) appears after \(v_i\) in the ordering.
Example
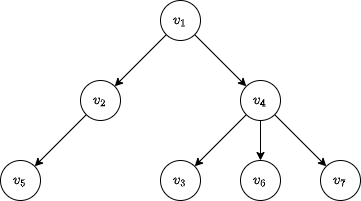
Following an acyclic graph.
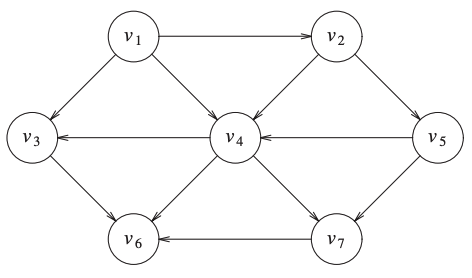
An example of a topological ordering: \(v_1, v_2, v_5, v_4, v_7, v_3, v_6\).
Activity
Give another topological ordering.
A Simple Algorithm
We define the indegree of a vertex \(v\), as the number of edges \((u,v)\).
A simple algorithm to find topological ordering is:
Find any vertex with an indegree of 0.
Remove it along with its edges.
Apply the strategy with another vertex.
We obtain the following pseudocode:
1void Graph::topsort()
2{
3 for (int counter = 0; counter < NUM_VERTICES; counter++){
4 Vertex v = findNewVertexOfIndegreeZero();
5 if (v == NOT_A_VERTEX){
6 throw CycleFoundException();
7 }
8 v.topNum = counter;
9 for each Vertex w adjacent to v{
10 w.indegree--;
11 }
12 }
13}
Where
findNewVertexOfIndegreeZero()scans the array of vertices looking for a vertex with indegree 0.If it returns
NOT_A_VERTEXit indicates that the graph has a cycle.The complexity of this algorithm \(O(|V|^2)\).
A Second Algorithm
The graph could be parsed, so checking each vertex could be a waste of time.
A second way to make a topological sort is to place every vertex of indegree 0 in a queue.
While the queue is not empty we remove one vertex.
All the adjacent vertices have their indegree decremented.
Following a pseudo-code of the algorithm:
1void Graph::topsort( )
2{
3 Queue<Vertex> q;
4 int counter = 0;
5
6 q.makeEmpty( );
7 for each Vertex v
8 if( v.indegree == 0 )
9 q.enqueue( v );
10
11 while( !q.isEmpty( ) )
12 {
13 Vertex v = q.dequeue( );
14 v.topNum = ++counter; // Assign next number
15 for each Vertex w adjacent to v
16 if( --w.indegree == 0 )
17 q.enqueue( w );
18 }
19
20 if( counter != NUM_VERTICES )
21 throw CycleFoundException{ };
22}
The running time of this algorithm is \(O(|E|+|V|)\).
Activity
Can you explain the running time?
Apply this algorithm to the previous graph.
Shortest-Path Algorithms
There are different shortest-path algorithms.
But, they have common properties:
The input is a weighted graph.
The weight for each edge \((v_i, v_j)\) is a cost \(c_{i,j}\) to traverse the edge.
The cost of a path \(v_1v_2\dots v_N\) is \(\sum_{i=1}^{N-1}c_{i,i+1}\).
Activity
What would be the cost of path in an unweighted graph?
Consider the previous graph:
What is the cost of the path \(v_1, v_2, v_5, v_7\).
Do you have a shorter path from \(v_1\) to \(v_7\)?
Unweighted Shortest Paths
Finding the shortest path in an unweighted graph is considering a weighted graph where all the edges have a cost of 1.
It is minimizing the number of edges in the path.
A very simple algorithm is breadth-first search.
Breadth-First Search
The idea is to process vertices in layers.
Example
Consider the previous unweighted directed graph.
We want to apply breadth first to find the shortest path from \(v_1\) to \(v_6\).
We obtain the following steps:
We start with the first node \(v_1\).
We check each arc leaving \(v_1\).
We continue until we find \(v_6\).
Activity
Apply the algorithm to find the shortest path from \(v_4\) to \(v_1\).
First Implementations
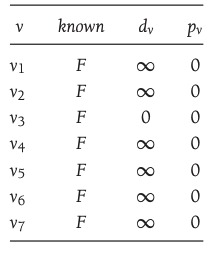
First we create a table that will keep track of the algorithm progress.
The table will keep track for each vertex:
its distance from \(s\) in \(d_v\).
the path \(p_v\).
if it was processed \(known\).
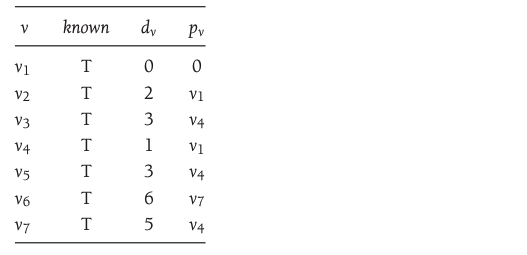
An example of the table for the previous graph, with \(s=v_3\):
The pseudo-code is given below:
1void Graph::unweighted( Vertex s )
2{
3 for each Vertex v
4 {
5 v.dist = INFINITY;
6 v.known = false;
7 }
8 s.dist = 0;
9 for( int currDist = 0; currDist < NUM_VERTICES; currDist++ )
10 for each Vertex v
11 if( !v.known && v.dist == currDist )
12 {
13 v.known = true;
14 for each Vertex w adjacent to v
15 if( w.dist == INFINITY )
16 {
17 w.dist = currDist + 1;
18 w.path = v;
19 }
20 }
21}
The complexity of this algorithm is \(O(|V|^2)\).
Activity
Is the algorithm efficient?
If not, how would you improve it?
Dijkstra’s Algorithm
Dijkstra’s algorithm is the general algorithm to solve the shortest path problem.
It is a greedy algorithm. It solves a problem by selecting what seems the best solution at each step.
The information that we keep:
Each vertex is either known or unknown.
A distance \(d_v\) is kept for each vertex.
The idea
It proceeds in stages.
At each stage, Dijkstra selects a vertex \(v\) which has the smallest \(d_v\) among all unknown vertices.
It becomes the new shortest path from \(s\) to \(v\).
Then it updates the values of \(d_w\).
In the unweighted case \(d_w = d_v + 1\).
In the weighted case \(d_w = d_v + c_{v,w}\).
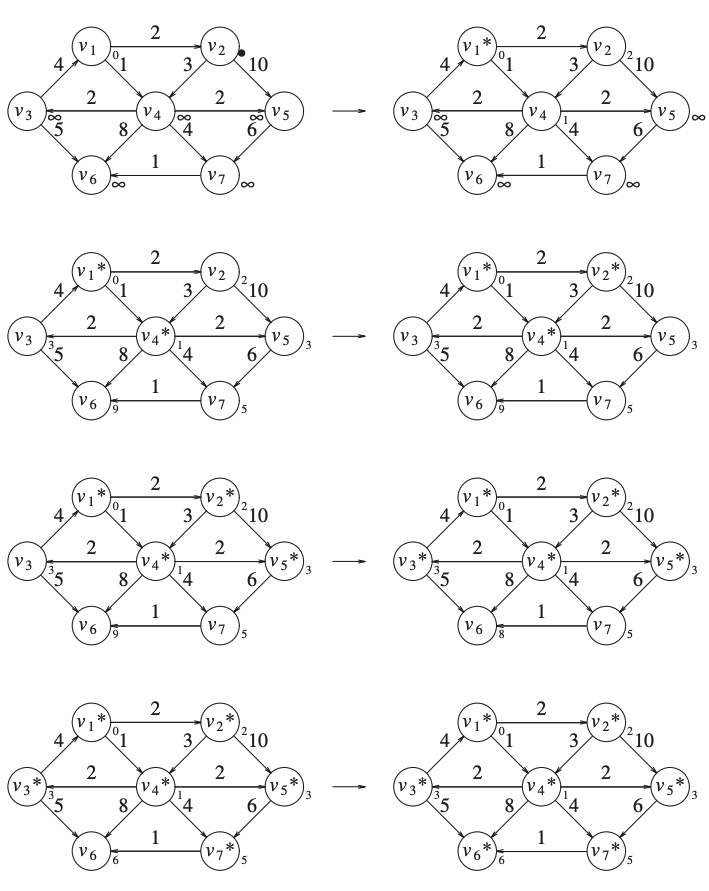
Example
We will illustrate the algorithm with an example.
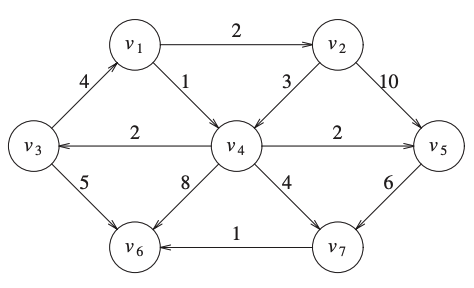
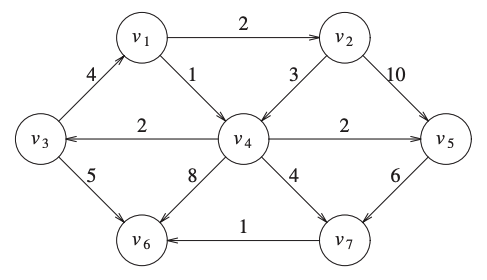
Consider the following graph:
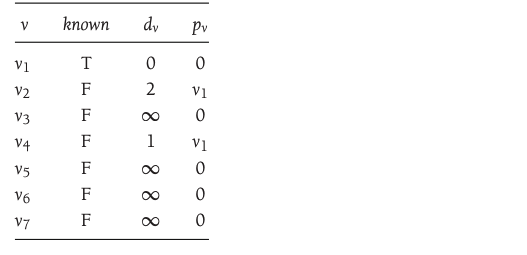
Now we have the initial configuration:
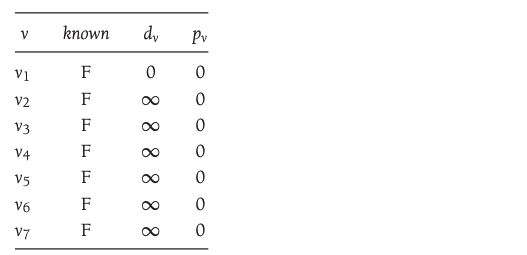
If we assume that \(s = v_1\) is our initial node.
Then we select \(v_1\), we put it to known.
\(v_2\) and \(v_4\) are adjacent, so we put their distances from \(v_1\).
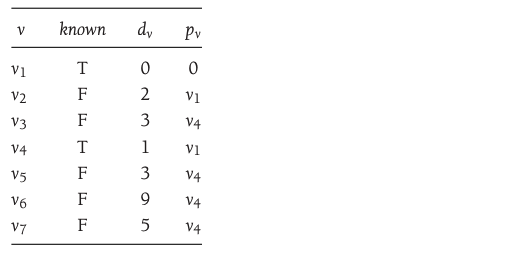
\(v_4\) has the smallest distance, so it is the next selected node.
It is marked as known.
\(v_3, v_5, v_6\) and \(v_7\) are adjacent.
We update them accordingly.
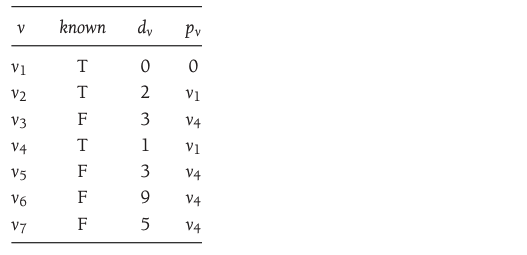
Next \(v_2\) is selected.
\(v_4\) is adjacent but already known, so no work is done on it.
\(v_5\) is adjacent but not adjusted, because going through \(v_2\) is \(12\) and a path of length 3 is already known.
The next vertex selected is \(v_5\).
\(v_7\) is the only one adjacent, but it is not adjusted.
Then, \(v_3\) is selected and \(v_6\) is adjusted to 8.
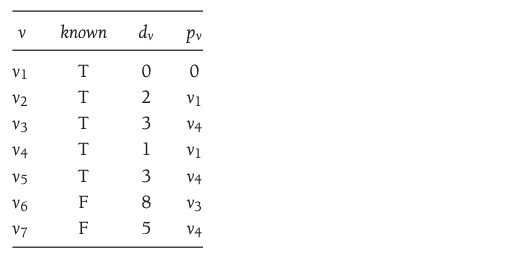
We then select \(v_7\).
We update \(v_6\) to 6.
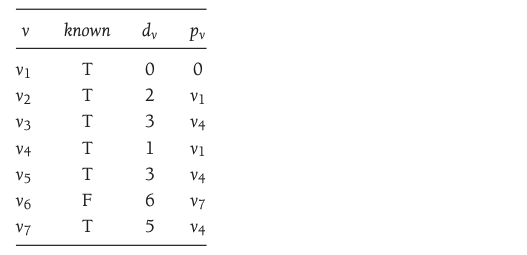
Finally we select \(v_6\) and stop there.
We can also show that graphically.
Implementation
The implementation is done in two parts.
The first part is the definition of the node:
1/**
2* PSEUDOCODE sketch of the Vertex structure.
3* In real C++, path would be of type Vertex *,
4* and many of the code fragments that we describe
5* require either a dereferencing * or use the
6* -> operator instead of the . operator.
7*/
8struct Vertex
9{
10 List adj; // Adjacency list
11 bool known;
12 DistType dist; // DistType is probably int
13 Vertex path; // Probably Vertex *, as mentioned above
14 // Other data and member functions as needed
15};
And the algorithm directly:
1void Graph::dijkstra( Vertex s )
2{
3 for each Vertex v
4 {
5 v.dist = INFINITY;
6 v.known = false;
7 }
8 s.dist = 0;
9 while( there is an unknown distance vertex )
10 {
11 Vertex v = smallest unknown distance vertex;
12 v.known = true;
13 for each Vertex w adjacent to v
14 {
15 if( !w.known )
16 {
17 DistType cvw = cost of edge from v to w;
18 if( v.dist + cvw < w.dist )
19 {
20 // Update w
21 decrease( w.dist to v.dist + cvw );
22 w.path = v;
23 }
24 }
25 }
26 }
27}
This algorithm is running in \(O(|E|+|V|^2) = O(|V|^2)\).
If the graph is too dense, the algroithm is slow.
With few modifications we can make it run in \(O(|E|\log |V|)\).
Network Flow Problems
Suppose a directed graph \(G=(V,E)\).
Each edge has a capacity of \(c_{v,w}\).
We could consider that the capacity is the amount of water that could flow through a pipe.
Definition
In a network flow problem, the graph contains two nodes:
\(s\) called the source.
\(t\) called the sink.
\(c_{v,w}\) is the maximum unit of “flow” that can pass.
At any vertex \(v\) (not being \(s\) or \(t\)) the total incoming flow must be equal to the total flow exiting the node.
The maximum flow problem is to determine the maximum flow amount that can pass from \(s\) to \(t\).
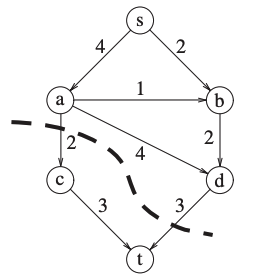
The following graph has a maximum flow of 5:
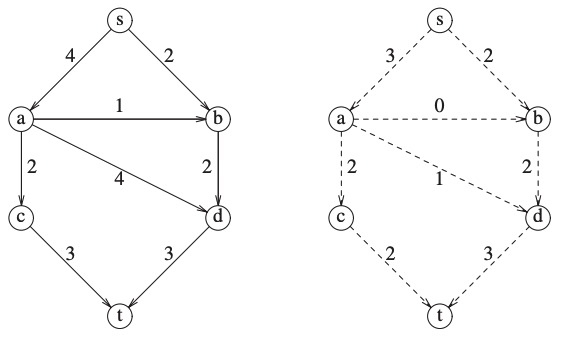
Activity
Do you have any real application of this problem?
Can you increase the flow in this graph?
Can you prove it?
If we cut the graph in two parts:
A part containing \(s\) and few nodes.
A part containing \(t\) and few nodes.
The capacity leaving the first part is the maximum flow:
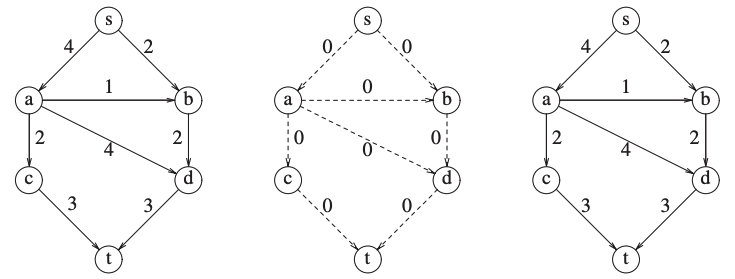
A simple Maximum-Flow algorithm
We start with our graph \(G\) and construct a flow graph \(G_f\).
\(G_f\) is the flow that has been attained at any stage.
Initially all edges in \(G_f\) has no flow.
At the end \(G_f\) should contain the maximum flow.
We also construct \(G_r\), the residual graph.
\(G_r\) contains for each edge how much flow can be added.
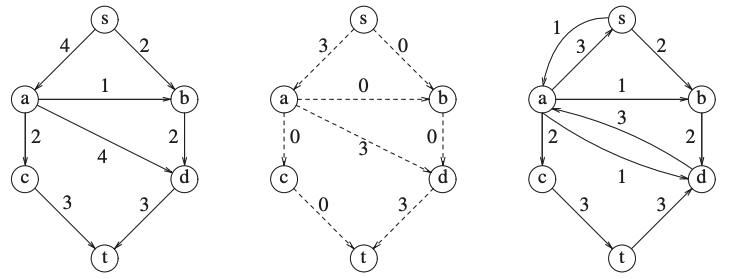
How does it work?
At each stage, we find a path in \(G_r\) from \(s\) to \(t\).
The minimum edge on the path is the amount of flow that is added to every edge on the path in \(G_f\).
We recalculate \(G_r\) and we add an opposite edge with the same capacity.
When we find no path from \(s\) to \(t\) in \(G_r\) we stop.
Example
If we apply it to the previous graph.
Now we find a path:
And we continue:
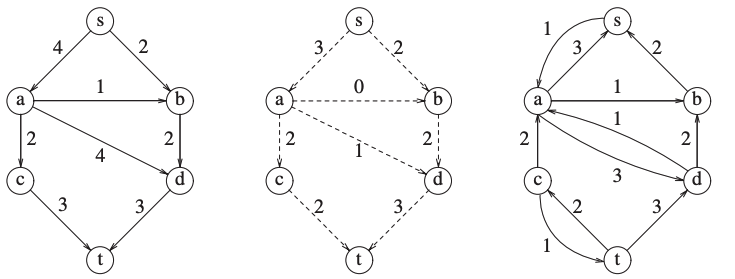
You can see that we changed a previous flow.