13. Dijsktra’s Algorithm
13.1. Previously
We introduced graphs.
We covered a single source shortest-path algorithm for unweighted graph \(G = (V, E)\).
The algorithm we covered is Breadth-First-Search (BFS).
The idea:
function BFS(Graph, source):
Create a queue Q.
Q.insert(s).
while Q not empty:
u = Q.pop()
visit(u)
for all v adjacent to u:
if v not marked or visited:
Mark v
Q.insert(v)
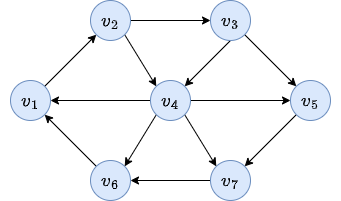
We took the following graph as example:
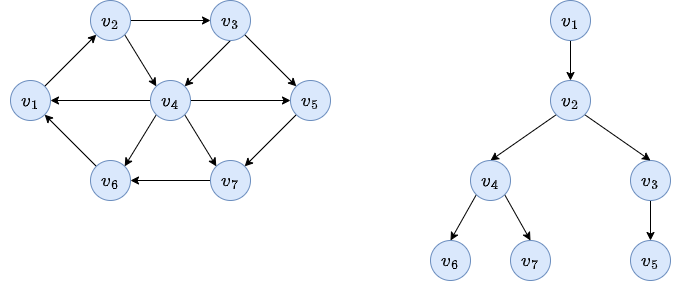
After applying the algorithm, we obtained:
Activity
What happens if the graph has weighted edges?
13.2. Dijsktra’s Algorithm
Dijsktra’s algorithm is a single source shortest-path algorithm for weighted graph.
It is also a greedy algorithm, meaning that we always take the closest node not already visited.
To work we need a few assumptions:
There is a path between the source (or start) and every other node in the graph.
All edges have a positive weight.
13.2.1. Application
Computer networking
Transportation
Geographic information systems
13.2.2. How is it working?
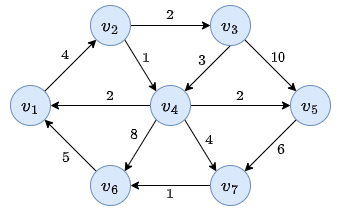
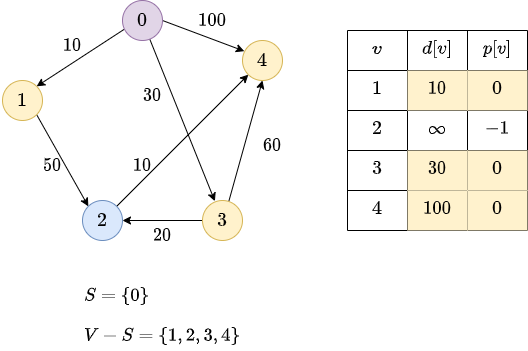
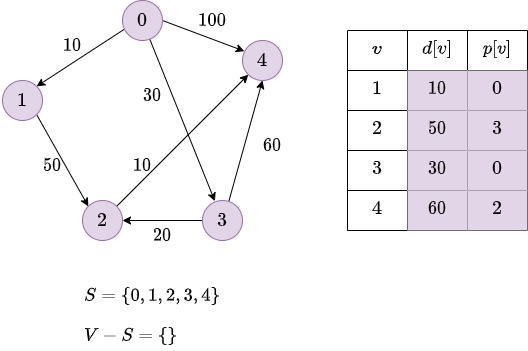
To explain how the algorithm works, we will consider the following graph:
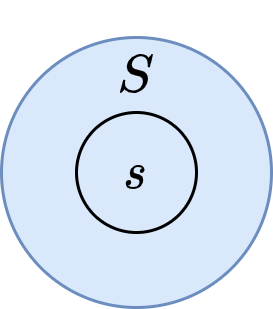
We consider two sets of nodes \(S\) and \(V-S\).
\(S\): set of nodes with the shortest distance already computed.
\(V-S\): set of nodes remaining.
We also need two arrays \(d\) and \(p\):
\(d[v]\): the shortest distance from \(s\) to \(v\).
\(p[v]\): the predecessor of \(v\) in the path from \(s\) to \(v\).
We initialize \(S\) with \(0\).
We place every nodes remaining in \(V-S\).
For each adjacent \(v\) of \(s\), we set \(d[v]\) equal to \(w(s, v)\).
The predecessor is \(0\) for every \(v\).
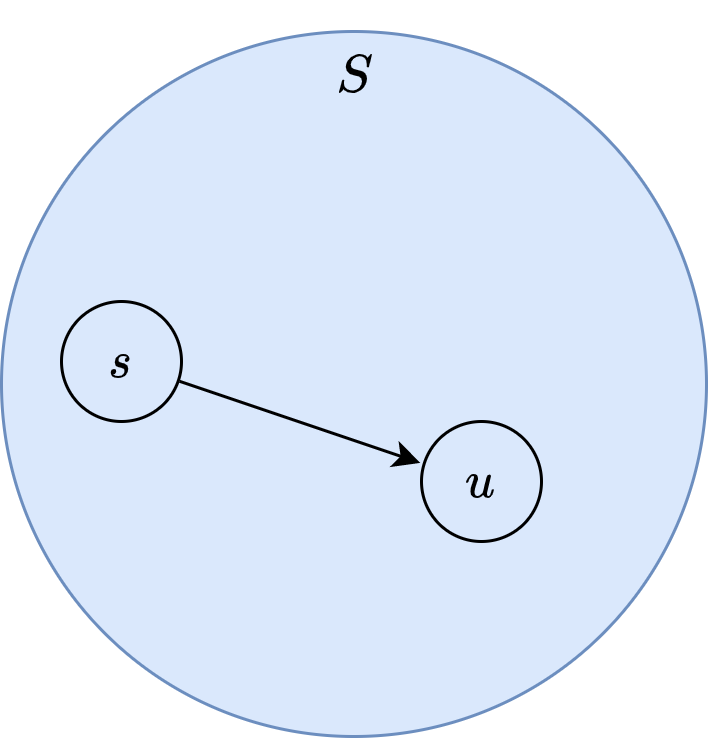
Now we find the vertex (node) \(u \in V-S\) that has the smallest \(d[v]\).
For every node \(v\) adjacent to \(u\):
if \(d[u] + w(u,v) < d[v]\), we update \(d[v]\).
and we set \(p[v]\) to \(u\).
In our example:
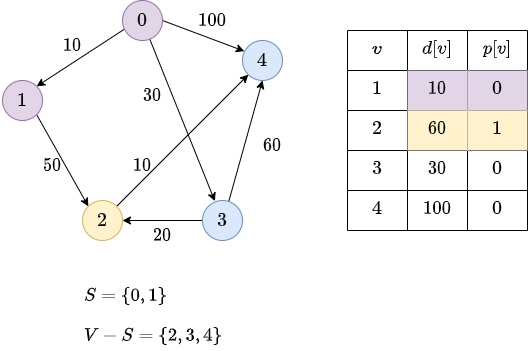
We continue:
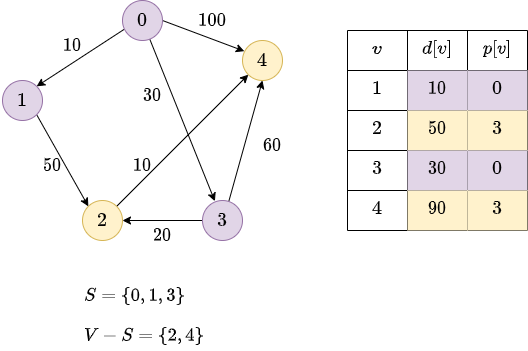
Again:
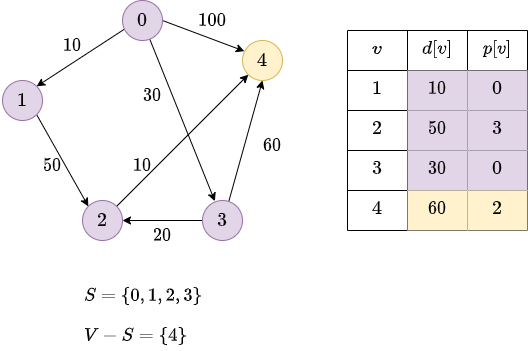
Finally:
13.2.3. Algorithm
Now we can discuss how to implement it.
A straightforward implementation is to use a list to maintain \(V-S\):
function Dijkstra(Graph, source):
create empty list L
for all vertex v in G:
d[v] = infinity
p[v] = null
L.insert(v)
d[source] = 0
while L is not empty:
u = vertex in L with smallest d value
L.remove(u)
for each neighbor v of u:
alt = dist[u] + w(u, v)
if alt < dist[v]:
d[v] = alt
p[v] = u
Activity
What is the time complexity of this implementation?
The time complexity if \(O(|V|^2)\):
The initialization takes \(O(|V|)\) as we need to insert every nodes in the list.
The while loop is \(O(|V|)\) as we need to loop over every nodes.
We have two nested loops inside.
The first is finding the closest node, so a linear search \(O(|V|)\).
The second one is checking each adjacent not in \(S\), so \(O(|V|)\).
We can improve this by using a binary heap.
function Dijkstra(Graph, source):
create empty priority queue Q
dist[source] = 0
for each vertex v in Graph:
if v != source:
dist[v] = infinity
p[v] = null
Q.insert(v, dist[v])
Q.insert(source, 0)
while Q is not empty:
u = Q.extract_min()
for each neighbor v of u:
alt = dist[u] + w(u, v)
if alt < dist[v]:
dist[v] = alt
p[v] = u
Q.decrease_key(v, alt)
return dist
The initialization is \(O(|V|\log |V|)\).
Q.extract_min()is \(O(\log |V|)\).Q.decrease_key(v, alt)is \(O(\log |V|)\).So the loop checking the adjacent nodes is \(O(|E|\log |V|)\).
Important
We visit each edges at most once! Thus the complexity is the complexity of updating all the adjacent nodes \(O(|E|\log |V|)\).
13.2.4. Proof of Correctness
Let \(G = (V, E)\) be a weighted, directed graph, where \(V\) is the set of vertices and \(E\) is the set of edges, and let \(s\) be the source vertex.
Let \(d[v]\) be the current distance estimate from the source vertex \(s\) to vertex \(v\).
We claim:
Claim
Each time Dijkstra’s algorithm selects a path to a node \(v\), that path is shorter than every other path to \(v\).
13.2.4.1. Base case
We start with the base case, \(|S| = 1\).
\(d[s] = 0\) and \(d[v] = +\infty, \forall v \neq s\).
The claim hold for \(S = {s}\).
13.2.4.2. Hold for \(n\)
Suppose the claim hold when \(|S| = n, n \geq 1\).
13.2.4.3. Induction step
Dijkstra’s algorithm add one more node \(v\) to \(S\).
So \(|S| = n+1\).
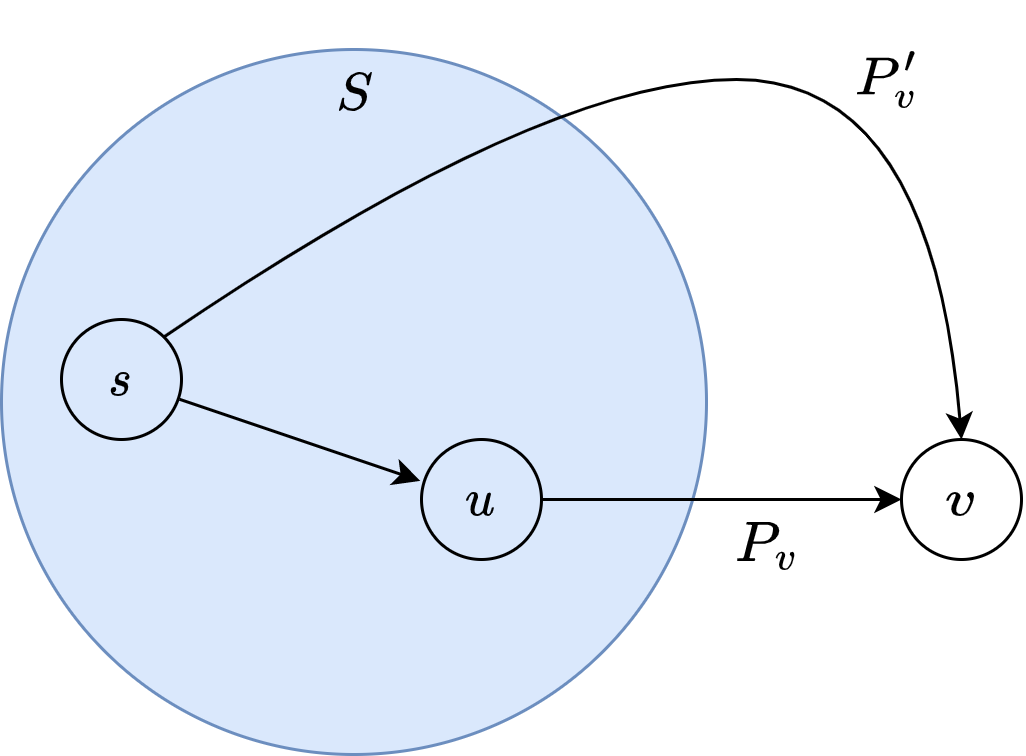
let \((u,v)\) the final edge on the path \(s-v\) denoted \(P_v\).
By induction hypothesis \(P_u\) is the shortest path from \(s\) to \(u\).
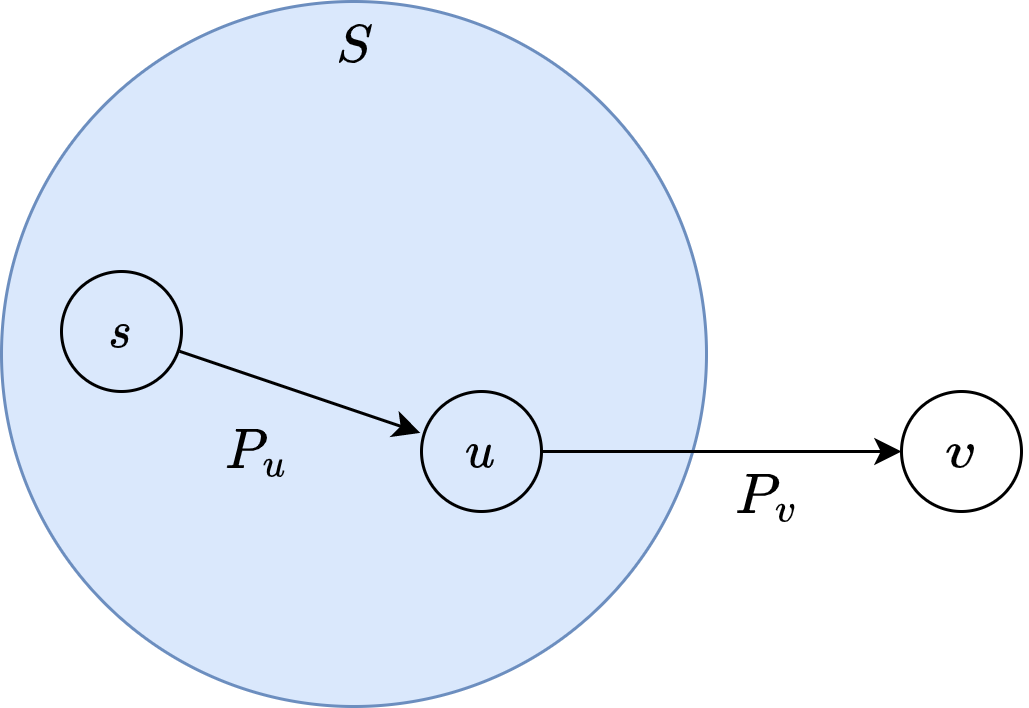
Now, consider any other path \(s-v\), denoted \(P'_v\).
We want to show that \(P'_v\) is as least as long as \(P_v\).
\(P'_v\) must leave \(S\) somewhere.
Let denote \(y\) the node on \(P'_v\), but not in \(S\).
Let denote \(x\) the node before \(y\), but in \(S\).
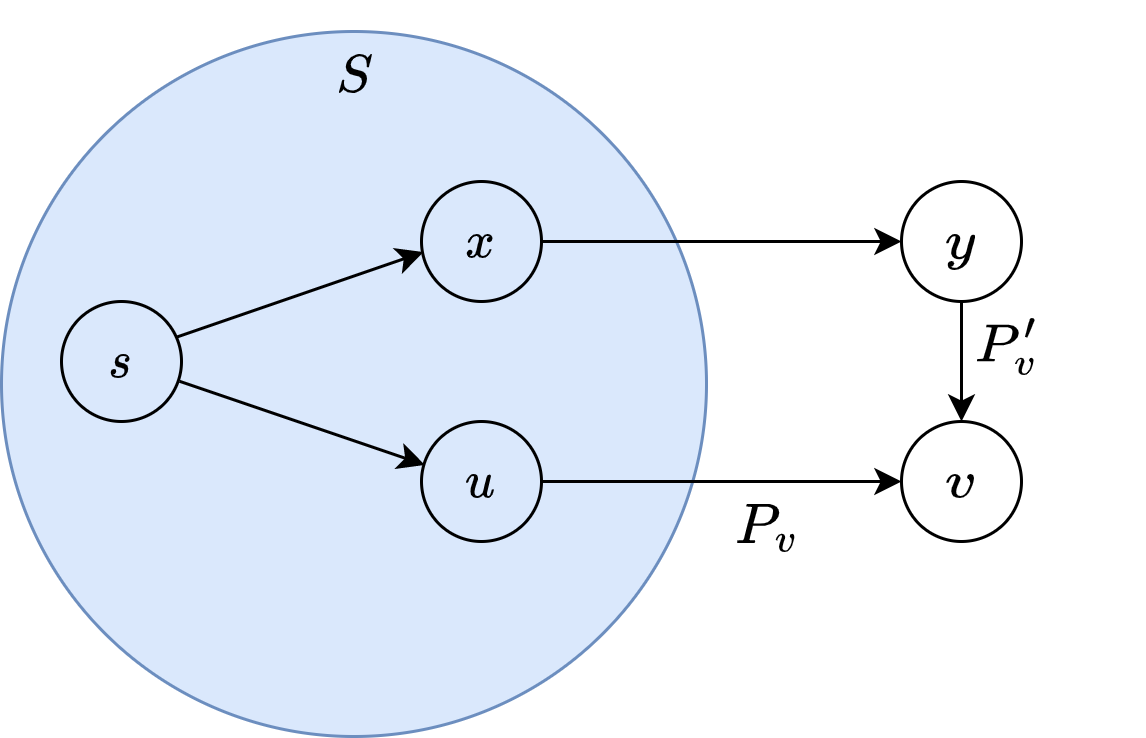
\(P'_v\) cannot be shorter than \(P_v\).
At iteration \(n+1\), Dijkstra considered \(y\) and rejected it.
It chose \(v\) instead.
So there is not path \(s-y\) through \(x\) shorter than \(P_v\).
13.2.5. Negative Weights
Until now, we assume that the graph only has positive weights.
If there are negative weights, then Dijkstra is not optimal.
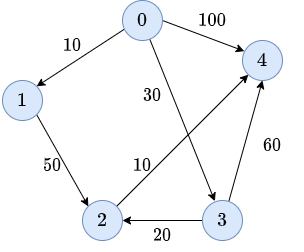
Example
Consider the following example:
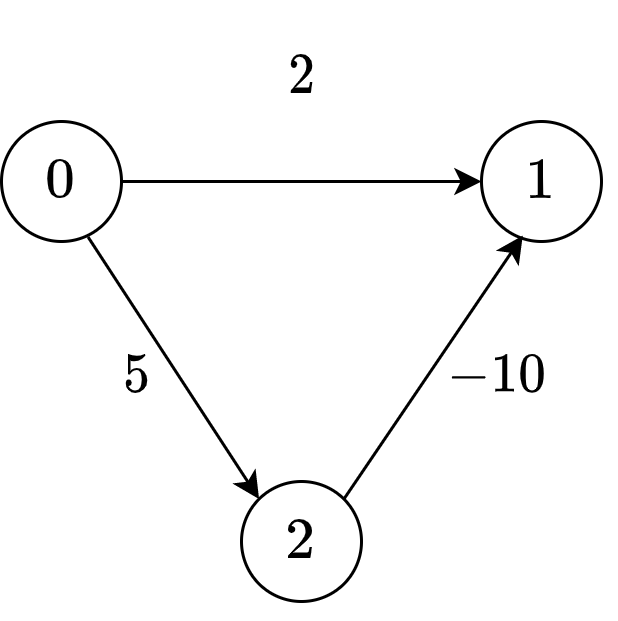
We initialize \(S\) and \(V-S\).
We update \(d[v]\) for every adjacent node of \(s\).

We choose \(1\) and add it to \(S\).
\(1\) has no adjacent nodes in \(V-S\).
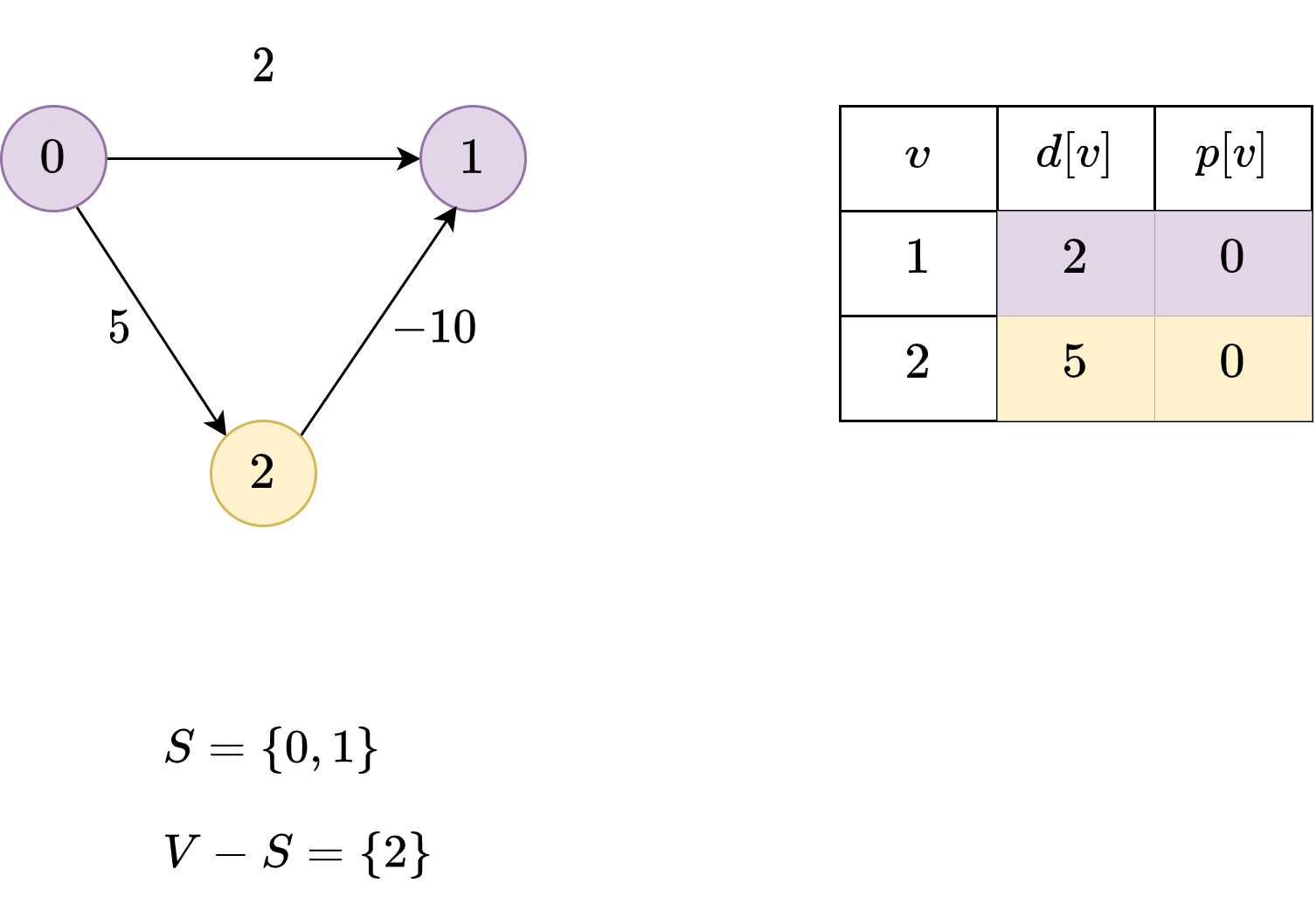
We add \(2\) to \(S\).
\(2\) has no adjacent nodes in \(V-S\).
So, we don’t update \(1\)!
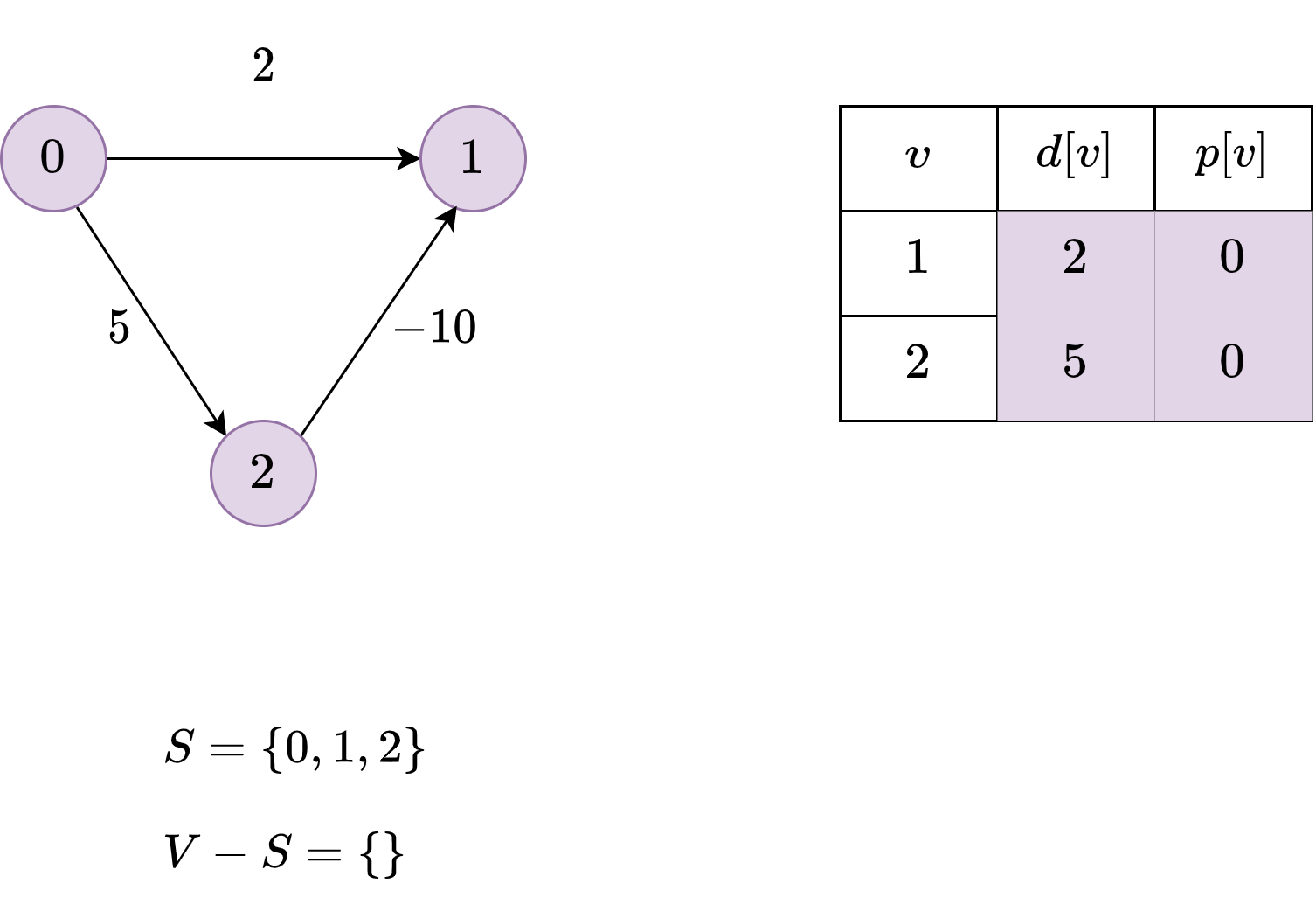
Important
This is why Dijkstra’s algorithm doesn’t work with negative weight.
Once a node is added to \(S\), we consider that we have the shortest distance to it.