Policy Gradient Methods#
Until now, we used action-value methods in which the action selected in a state depends of its estimated value.
However, instead of learning an action value function, we will learn a parameterized policy that can select actions without a value function.
Note
While a value function can support policy learning, it is not strictly necessary.
We define \(\mathbf{\theta} \in \mathbb{R}^{d'}\) as the vector of policy parameters. The probability of taking action \(a\) in state \(s\) at time \(t\), given parameters \(\mathbf{\theta}\), is defined as:
The policy parameters are updated using the gradient of a scalar performance measure, \(J(\mathbf{\theta})\). Since we aim to maximize this measure, we apply gradient ascent:
where \(\widehat{\nabla J(\mathbf{\theta}_t)} \in \mathbb{R}^{d'}\) is a stochastic estimate that approximates the gradient of \(J\) with respect to \(\mathbf{\theta}_t\).
Policy Approximation and its Advantages#
In policy gradient methods, the policy’s parameterization is flexible as long as \(\pi(a|s,\mathbf{\theta})\) is differentiable with respect to \(\mathbf{\theta}\). In practice we require that the policy never becomes deterministic.
Activity
Why don’t we want to have a deterministic policy in policy gradient methods?
For discrete action spaces, we can create a parameterized preference \(h(s, a, \mathbf{\theta})\in \mathbb{R}\) for each state-action pair. Actions with higher preferences are assigned greater probabilities via a softmax distribution:
Softmax parameterization offers two advantages:
The approximate policy can approach a deterministic policy, whereas with \(\epsilon\)-greedy will always have a probability to choose a suboptimal action.
It also enables the selection of actions with arbitrary probabilities. Some problem doesn’t have one optimal action for a state, but multiple with different probabilities.
Example 6 (Softmax)
To clarify we will take a simple example. We have four actions \(A={a_1, a_2, a_3, a_4}\) with the following preferences for the state \(s\):
\(h(s,a_1,\theta) = 2\)
\(h(s,a_2,\theta) = -1\)
\(h(s,a_3,\theta) = 0\)
\(h(s,a_4,\theta) = 1\)
import numpy as np
import matplotlib.pyplot as plt
h = [2, -1, 0, 1]
det = np.sum([np.exp(h_a) for h_a in h])
pi = []
for h_a in h:
pi.append(np.exp(h_a)/det)
plt.bar(["a_1","a_2","a_3","a_4"], pi)
plt.show()
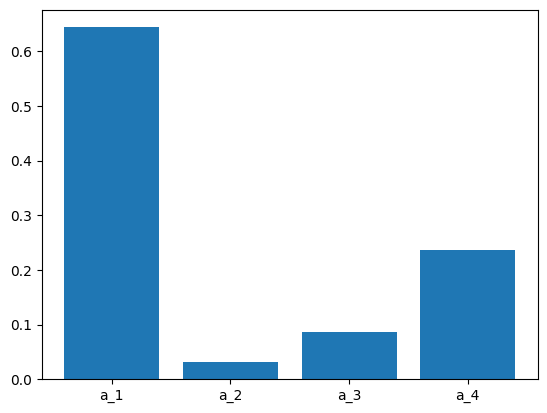
We can see that the action with the highest preference, \(a_1\), has more than 60% chance to be selected, while the least prefered action, \(a_2\), has a probability of less than 10%, but not 0%!
REINFORCE: Monte Carlo Policy Gradient#
As always, we can study a first algorithm based on Monte Carlo as it is always easier to implement.
The policy gradient theorem establishes:
It provides an analytic expression for the gradient of performance with respect to the policy parameter, but does not involve the derivative of the states distribution.
Note
We will not see the proof, but you can look it up if you’re interested.
If we stop there, we could create our gradient-ascent algorithm as:
where \(\hat{q}\) is some learned approximation to \(q_\pi\).
However, we want to remove the q-values to only need the policy. So we modify REINFORCE to introduce an action \(a\) by replacing the sum over the q-values values by an expectation under \(\pi\).
The previous equation does not have the term weighted by \(\pi(a|s,\mathbf{\theta})\), so we can change that by multiplying and then dividing the summed terms by \(\pi(a|s,\mathbf{\theta})\):
The final expression is a quantity that can be sampled and if we integrate that to our algorithm, we have the following update of the parameters:
Concretly, each increment is proportional to the product of a return \(G_t\) and a vector.
The vector is the direction in parameter space that most increases the probability of repeating the action \(a_t\) on future visits to state \(s_t\).
The update increases the parameter vector in this direction proportional to the return, and inversely proportional to the action probability.
The former makes sense because it causes the parameter to move most in the directions that favour actions that yield the highest return.
The latter makes sense because otherwise actions that are frequently selected are at an advantage and might win out even if they do not yield the highest return.
Algorithm 15 (Monte Carlo policy-gradient)
\( \begin{array}{l} \textbf{Inputs}:\\ \quad\quad N\ \text{the number of episodes}\\ \quad\quad \alpha\in [0, 1]\ \text{the step size}\\ \quad\quad \text{A policy parameterization}\ \pi (a|s,\theta)\\ \textbf{Initialize}: \\ \quad\quad \theta \in \mathbb{R}^{d'}, \text{e.g. to}\ \mathbf{0}\\ \textbf{Repeat}\ \text{for}\ N\ \text{episodes:}\\ \quad\quad \text{Generate an episode using } \pi: s_0, a_0, r_1, \dots, s_{T-1}, a_{T-1}, r_T\ \text{following}\ \pi (.|.,\theta)\\ \quad\quad \textbf{Repeat } \text{for each step } t = 0,1 ,\dots, T-1:\\ \quad\quad\quad\quad G \leftarrow \sum_{k=t+1}^T\gamma^{k-t-1} r_{k}\\ \quad\quad\quad\quad \theta \leftarrow \theta + \alpha\gamma^t G\nabla\ln\pi(a_t|s_t,\theta)\\ \end{array} \)
Actor-Critic methods#
We have seen with TD and SARSA that a one-step update is often more interesting in terms of computation. However, the previous policy-gradient method requires the entire return.
Actor-critic methods allow us to have a one-step policy gradient.
The idea:
We use the q-value to assess the action.
When q-values are used this way it is called a critic.
And the policy is an actor.
We replace the full return of REINFORCE by a one-step return as follows:
\[\begin{split} \begin{aligned} \mathbf{\theta}_{t+1} &= \mathbf{\theta}_t + \alpha\left( G_{t:t+1}-\hat{v}(s_t,\mathbf{w}_t) \right)\frac{\nabla\pi (a_t|s_t,\mathbf{\theta}_t)}{\pi (a_t|s_t,\mathbf{\theta}_t)}\\ &= \mathbf{\theta}_t + \alpha\left( r_{t+1} + \gamma\hat{v}(s_{t+1},\mathbf{w}) -\hat{v}(s_t,\mathbf{w}) \right)\frac{\nabla\pi (a_t|s_t,\mathbf{\theta}_t)}{\pi (a_t|s_t,\mathbf{\theta}_t)}\\ &= \mathbf{\theta}_t + \alpha\delta_t\frac{\nabla\pi (a_t|s_t,\mathbf{\theta}_t)}{\pi (a_t|s_t,\mathbf{\theta}_t)}\\ \end{aligned} \end{split}\]It is combined with the state-value-function of TD(0) and we obtain the following algorithm:
Algorithm 16 (One-step Actor-critic)
\( \begin{array}{l} \textbf{Inputs}:\\ \quad\quad N\ \text{the number of episodes}\\ \quad\quad \alpha^\theta, \alpha^\mathbf{w}\in [0, 1]\ \text{the step size}\\ \quad\quad \text{A policy parameterization}\ \pi (a|s,\theta)\\ \quad\quad \text{A value function parameterization}\ \hat{v}(s,\mathbb{w})\\ \textbf{Initialize}: \\ \quad\quad \theta \in \mathbb{R}^{d'}, \text{e.g. to}\ \mathbf{0}\\ \quad\quad \mathbf{w} \in \mathbb{R}^{d}, \text{e.g. to}\ \mathbf{0}\\ \textbf{Repeat}\ \text{for}\ N\ \text{episodes:}\\ \quad\quad s \leftarrow Initial state\\ \quad\quad I \leftarrow 1\\ \quad\quad \textbf{While } s\ \text{not terminal}:\\ \quad\quad\quad\quad a \sim \pi (. |s,\theta )\\ \quad\quad\quad\quad r, s' \leftarrow \text{Execute } a\\ \quad\quad\quad\quad \delta \leftarrow r + \gamma\hat{v}(s',\mathbf{w}) - \hat{v}(s,\mathbf{w})\\ \quad\quad\quad\quad \mathbf{w} \leftarrow \mathbf{w} + \alpha^\mathbf{w}\delta\nabla\hat{v}(s,\mathbf{w})\\ \quad\quad\quad\quad \theta\leftarrow \theta + \alpha^\theta I \delta\nabla\ln \pi(a|s,\theta)\\ \quad\quad\quad\quad I \leftarrow \gamma I\\ \quad\quad\quad\quad s \leftarrow s' \\ \end{array} \)
Continuous Actions#
Some problems can have continuous actions.
Until now the previous methods were suing q-values, thus tabular methods.
It would be very complicated to adapt this types of methods to continuous actions.
Thankfully, policy-gradient offers a very practical way to do that!
Activity
Give some problems that have very large or continuous action space?
How does it work:
We don’t compute the probability for each action.
We learn a probability distribution.
We could choose to use a Gaussian distribution to select the actions:
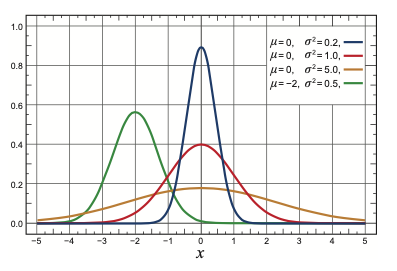
If we want to use a normal distribution with a policy parameterization, then we can rewrite \(\pi(a|s,\mathbf{\pi})\) as a normal distribution:
It also implies that the policy’s parameter vector is in two parts, \(\mathbf{\theta}=[\mathbf{\theta}_\mu, \mathbf{\theta}_\sigma]^T\).