1. Localization in a Maze
Worth: 5%
DUE: February 15th, 2023 at 11:55pm; submitted on MOODLE.
Warning
For this assignment, you may not work with anyone else.
You need to work independently.
1.1. Context
In this assignment you will implement a localization system for a robot in a maze.
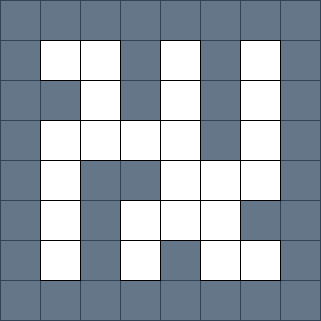
The maze is a represented by a discrete grid, each cell of the grid can either contain a wall, the robot or nothing.
The maze should be partially symmetric, for example:
The robot receives a measurement \(z_t = [z_n, z_s, z_e, z_w]\) where each \(z_i \in z_t\) is a boolean indicating a wall.
Example
If the robot is in the following cell:
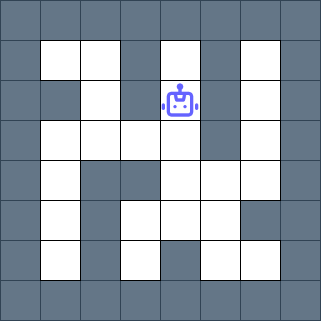
It should receive the measurement \(z_t = [0, 0, 1, 1]\) if the sensor is perfect.
The robot navigates in the maze until it is confident (\(> 80\%\)) about its position.
1.2. Instructions
This part gives you the instructions for the assignment.
1.2.1. Maze
You need to create 3 different mazes.
Each maze need to have a size of at least \(8\times 8\).
They should be close to be symmetric, but not exactly.
You need to represent them by using a 2D
numpyarray.
Example
The previous maze would be represented by the following numpy array:
maze = np.array([[1,1,1,1,1,1,1,1],
[1,0,0,1,0,1,0,1],
[1,1,0,1,0,1,0,1],
[1,0,0,0,0,1,0,1],
[1,0,1,1,0,0,0,1],
[1,0,1,0,0,0,1,1],
[1,0,1,0,1,0,0,1],
[1,1,1,1,1,1,1,1]])
1.2.2. Motion and measurement model
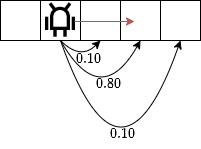
You need to implement the motion model.
The motion model \(p(x_t|x_{t-1},u_t,m)\) is not perfect.
When the robot moves in one direction there is probability of 10% to undershoot, 10% to overshoot and 80% to reach the correct cell.
The robot can only move one cell at a time.
If there is a wall it stays in the cell just before the wall.
You need to implement the measurement model \(p(z_t|x_t,m)\).
You have 75% to receive the correct measurement.
You have a uniform probability on the other measurements.
1.2.3. Simulator
You need to create a simulator, the simulator will run a simulation:
It will select an initial random position in the maze.
It will maintain both the belief and the true position.
It will select an action based on the current initial belief in the direction of an empty cell.
It will apply the motion model based on the true position.
It will generate a measurement based on the true position and the measurement model.
It will apply the Markov localization algorithm to update the belief.
It will save each belief and true positions.
1.2.4. Results
You will need to provide the results of your simulations:
You will plot the beliefs as heatmaps (only a few steps) for each simulation.
You will plot the true positions for each simulation
1.3. Submission
You need to submit on Moodle the following:
The code correctly commented.
The code allows the user to select the maze and run the simulation.
The code needs to save the results.