1. Introduction
1.1. What is a robot?
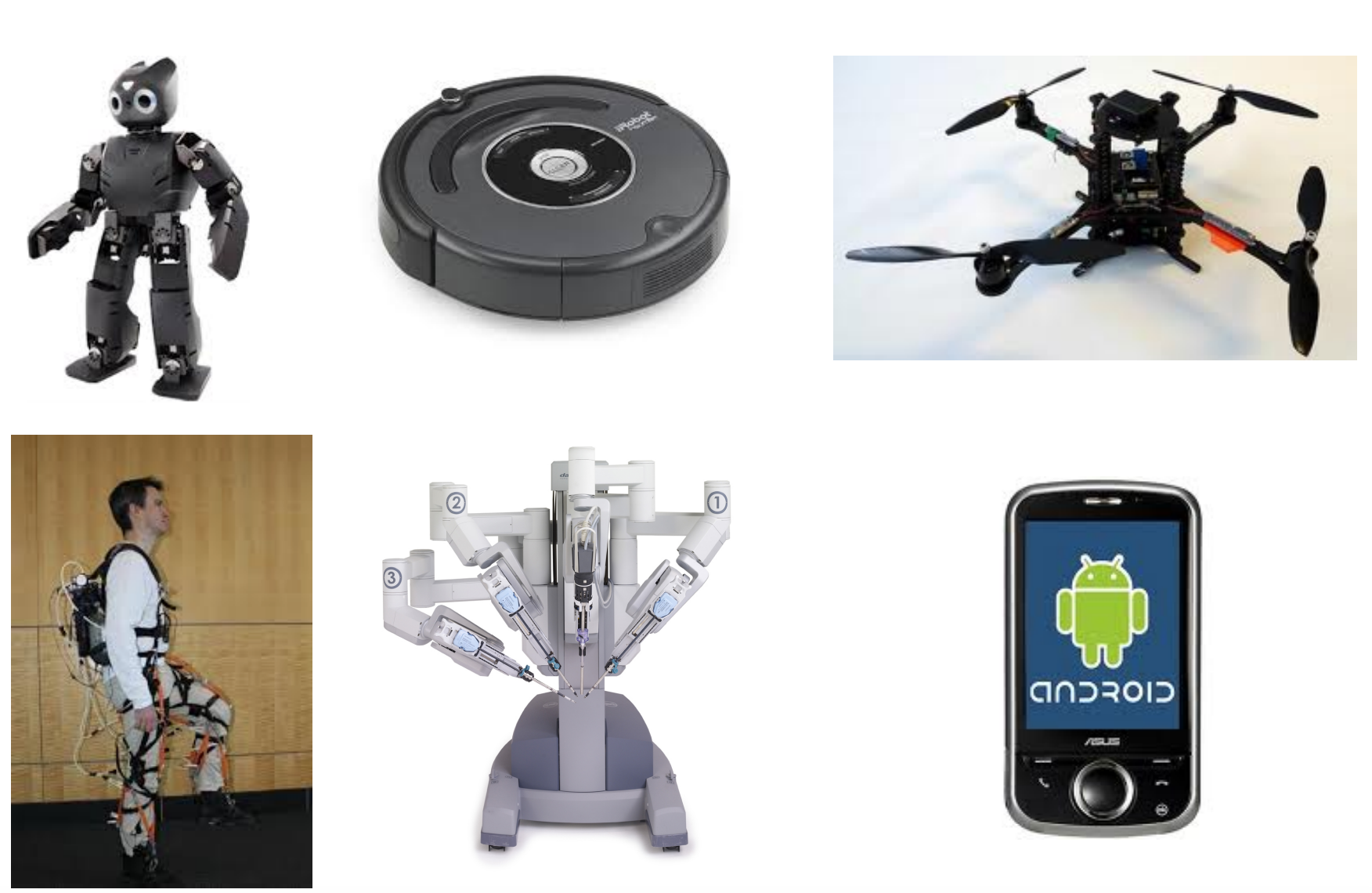
A robot is the sum of:
Sensors
Actuators
Computing
Communication
Ability to move
Intelligence (AI)
The objective is to make robots autonomous!
1.2. How?
We need a lot of things!
Localization
Mapping
Robot Kinematics
Task allocation
Planning
We will not focus too much on the robot kinematics, as it is more ingeniering than computer science.
- Building a robot is very complicated but awesome!
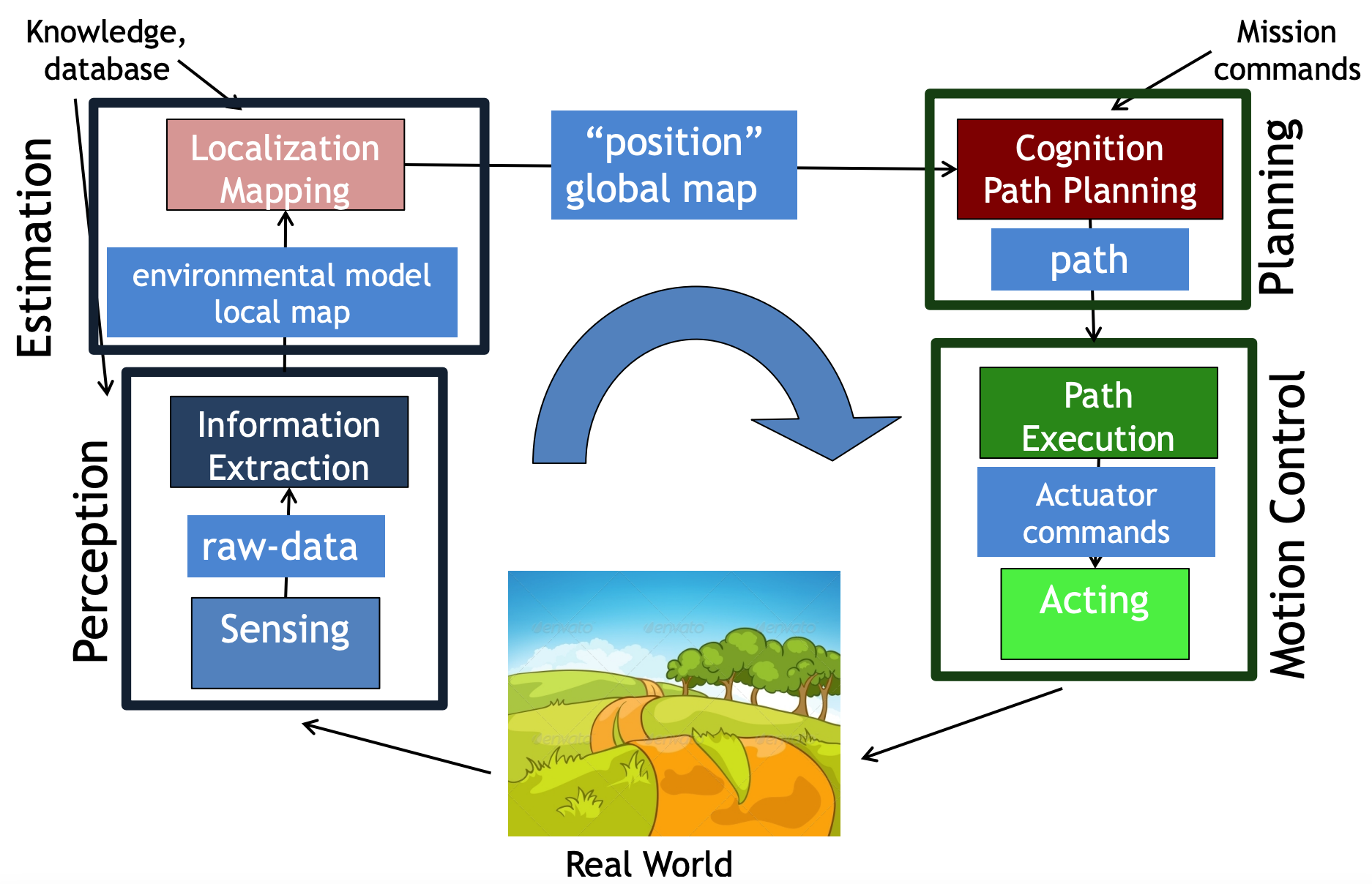
1.3. Robot Autonomy Architecture