8. Grid Localization
The Markov localization doesn’t consider raw measurement.
The grid localization algorithm can solve global localization problem using raw measurement.
The algorithm uses a histogram filter:
Take a continuous environment.
Discretize it in many regions.
Calculate the belief for each region.
8.1. The Algorithm
The algorithm is similar to the Bayes filter:
We want to maintain a belief \(b(x_t)\).
As we use a grid \(b(x_t)= \{p_{k,t}\}\).
where \(p_{k,t}\) is the probability over a cell \(\mathbf{x}_k\).
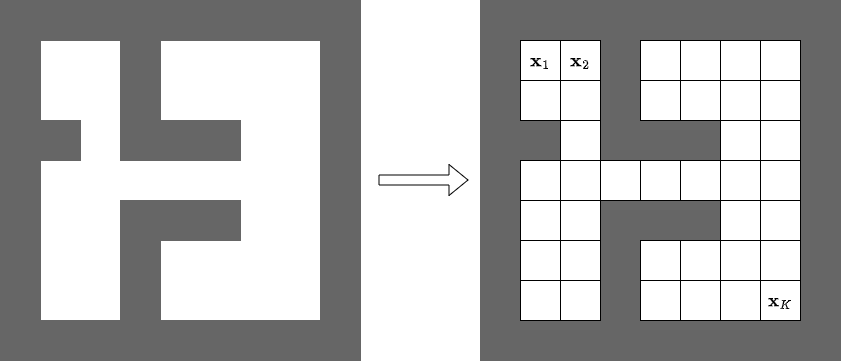
All legitimate poses forms a partition of the space:
\(\text{domain}(X_t) = \mathbf{x}_{1,t} \cup \mathbf{x}_{2,t} \cup \dots \cup \mathbf{x}_{K,t}\)
The figure below illustrates how we can create a domain of all poses possible:
Note
Usually, we choose a granularity of 15 cm for the \(x\) and \(y\) dimension and \(5\) degrees for the rotational dimension.
The pseudocode of the algorithm is:
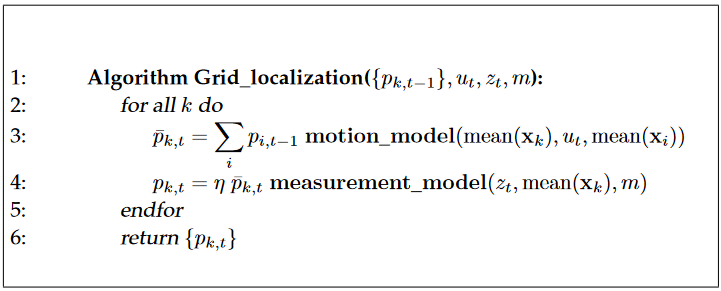
The algorithm takes four parameters:
The current belief \(b(x_t) = \{p_{k,t}\}\).
The control action \(u_t\).
The measurement \(z_t\).
The map.
The prediction is done with the motion model of the robot, that we covered in a previous topic.
The prediction is updated using the measurement model seen previously.
Important
The \(\text{mean}(\mathbf{x}_k)\) is the center of a grid cell \(\mathbf{x}_k\).
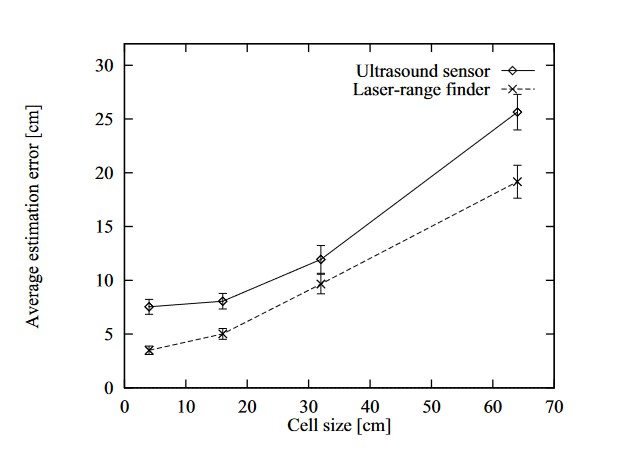
8.2. Grid resolutions
A key in grid localization is the resolution of the grid.
It impacts:
The type of sensor model we can use.
The way the belief is calculated.
The type of results we can expect.
A common representation is the metric representation:
The state space is divided into fine-grained cells of uniform sized.
Like mentioned before 15 cm is the norm.
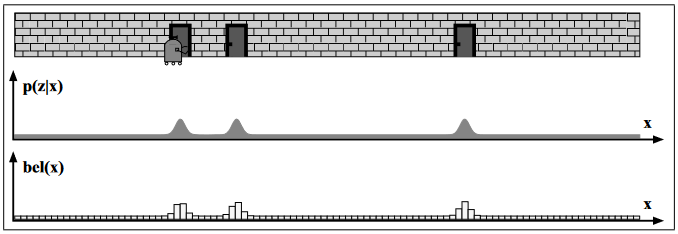
If we take a previous example with the robot in a hallway, we can divide the hallway in small cells:
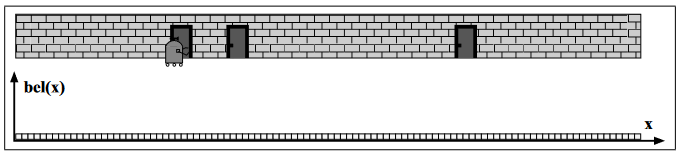
We receive a measurement \(z_t\) that we use to update the belief:
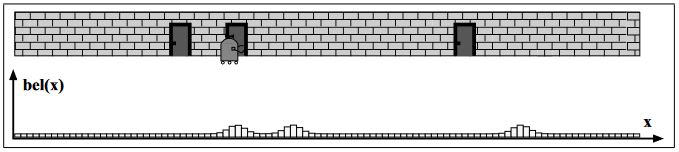
Then the robot is executing an action, which leads to a new predicted belief:
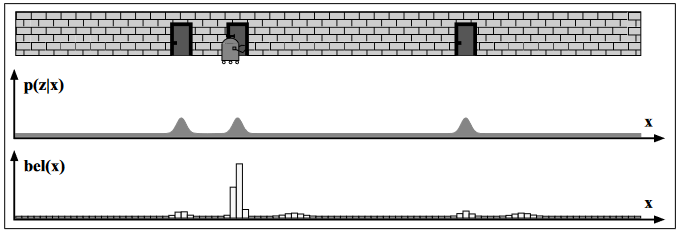
Then, it receives a new measurement:
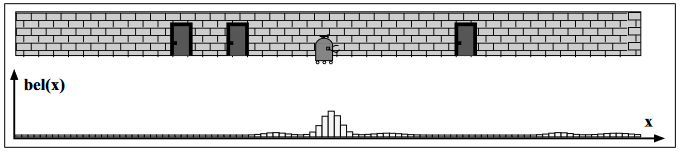
And it continues:
Note
High-resolution sensor needs some particular process, as the \(p(z_t|x_t)\) may vary drastically inside each cell \(\mathbf{x}_{k,t}\).